Robotic Mower Statistics
How inefficient is a lawn mower that cuts on a randomized pattern? How many square meters does it actually mow before it successfully mowed the whole lawn? - Let’s find out!
Introduction
DISCLAIMER: This blog post is not written to start any debate on which cutting method that is the correct one. - All I can say is that our lawn looks better with an robotic lawn mower compared to how it looked before.
In this solution, I will use Real-Time Kinematic (RKT) GPS with centimeter level accuracy to track the movements our Husqvarna AutoMower 315 Mark II robotic mower and upload the data into a MongoDB Atlas database which in the end will provide me with the possibilities to visualize and graph how much time and area the robotic lawn mower need to cut before the whole lawn is mowed at least once.
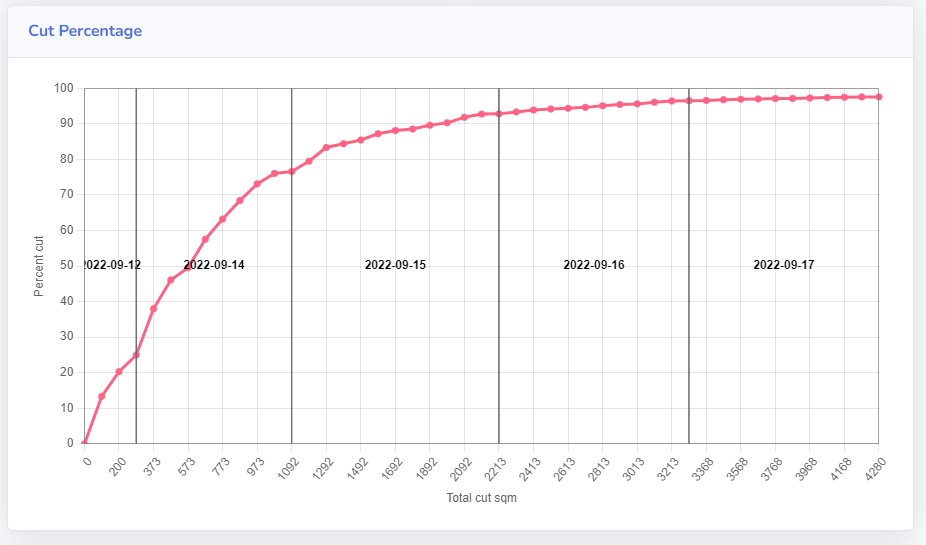
And the results? - Around 4000 total square meters are cut before the total mowed area gets close to 100%.
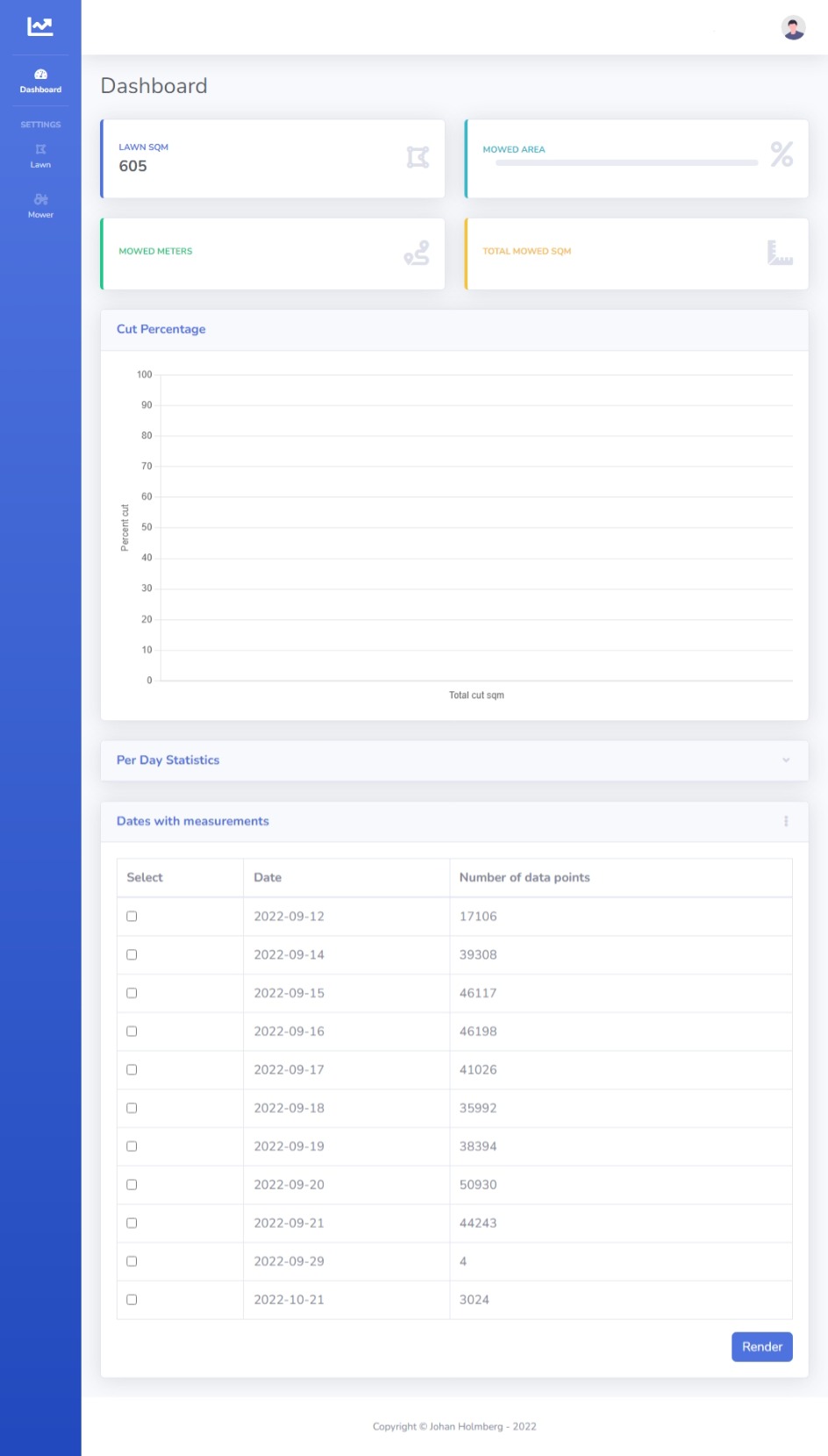
The frontend built looks like this:
Solution
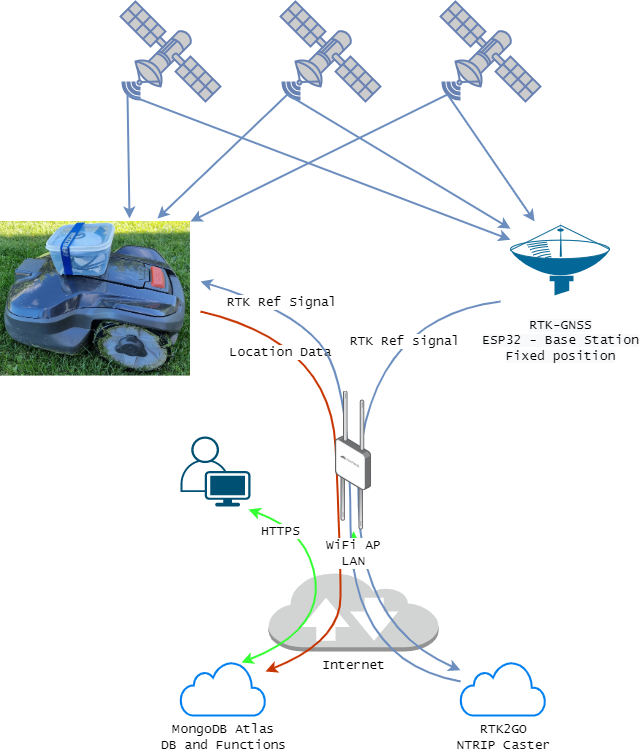
To solve this task, multiple components and services has been used.
First of all, RTK-GPS was a requirement from my side to provide the GPS/GNSS accuracy required for location data to be useful in this analysis. Normal GPS, where meter-accuracy is achieved is not sufficient in this scenario. RTK-GPS provides centimeter accuracy which is what I need in this case.
I also needed a way to transport the RTK reference signal from my base station to the Mower which is considered as a rover. It turned out that my WiFi covered almost all of my lawn so I decided to go for WiFi for simplicity.
My RTK-GPS base station was already in place and running from previous projects and the reference signal has been sent to RTK2GO for a long time. More information about the RTK-Base station I built earlier which runs on a ESP32 microcontroller powered thru PoE can be found here NTRIP-Server_ESP32-PoE-BaseStation
The GPS/GNSS location data which is produced once per second from on Ublox ZED-F9P GNSS module is added to a buffer in the ESP32 microcontroller running on the mower and then on every 10 seconds it send it’s buffer to a HTTPS endpoint and function living in the MongoDB Atlas Cloud service.
If WiFi is lost, then GPS positions are buffered and sent once the WiFi connectivity is reestablished. RTK-GPS seem to maintain its “FIX” status for about 30-60 seconds without a reference signal.
The receiving MongoDB Atlas Function is responsible for parsing the raw NMEA string which was collected and sent by the ESP32 microcontroller to MongoDB. After parsing the NMEA String, the MongoDB function creates a geoJSON point feature of each measurement and inserts it into a time series collection in the database.
The Lawn perimeter and the exclusions (staircase and trees) in it has all been mapped with the help of the same Ublox ZED-F9P, but connected to an Android phone running SW MAPS.
What is RTK-GPS?
This project relies heavily on the use of RTK-GPS/GNSS to get the accuracy needed in this situation where want to know if the mower cutting disc has passed a specific location or not. - So what is RTK-GPS and how does it compare with normal GPS?
RTK-GPS uses a reference signal which is transmitted from a fixed base-station to a mowing rover. In this setup the RTK Base station is mounted on our house and the rover is the hardware which is mounted on the AutoMower itself.
RTK-GPS explanation from Wikipedia: In practice, RTK systems use a single base-station receiver and a number of mobile units. The base station re-broadcasts the phase of the carrier that it observes, and the mobile units compare their own phase measurements with the one received from the base station. … RTK provides accuracy enhancements up to about 20 km from the base station.
This allows the units to calculate their relative position to within millimeters, although their absolute position is accurate only to the same accuracy as the computed position of the base station. The typical nominal accuracy for these systems is 1 centimeter ± 2 parts-per-million (ppm) horizontally and 2 centimeters ± 2 ppm vertically.
Although these parameters limit the usefulness of the RTK technique for general navigation, the technique is perfectly suited to roles like surveying. In this case, the base station is located at a known surveyed location, often a benchmark, and the mobile units can then produce a highly accurate map by taking fixes relative to that point. RTK has also found uses in autodrive/autopilot systems, precision farming, machine control systems and similar roles.
Mower
The hardware was placed in a waterproof food container. Food containers are cheap, watertight and available in many different sizes which makes them as a good option for DIY projects.

Hardware
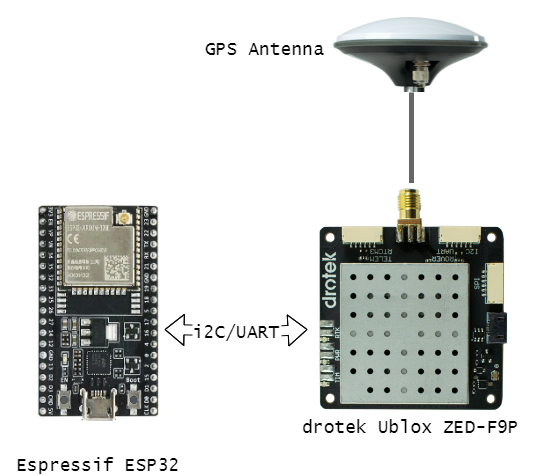
The hardware placed on the mower consists of:
- 10000 mAh powerbank. Is capable of powering the hardware for about 14-16 hours.
- A drotek Ublox ZED-F9P GNSS module.
- DA910 Multi-band GNSS Antenna
- Espressif ESP32 as the “brain”. It is responsible for:
- Getting the RTK reference signal from RTK2GO cloud service and sending it thru I2C to the Ublox ZED-F9P GNSS module.
- Receive the NMEA GNGGA message from the ZED-F9P at 1 HZ and buffer it until next uplink to MongoDB.
- Send the NMEA buffer to the HTTPS endpoint/Function in MongoDB Atlas.
Software
In this project, both CPU cores of the ESP32 are used to be able to execute the tasks in parallel.
- First core is responsible for:
- Connect and subscribe to the RTK-GNSS reference signal from the RTK2GO NTRIP Caster cloud service and push it to the ZED-F9P module thru I2C.
- Listen to the NMEA string output from the ZED-F9P which occurs at 1HZ and push it to the NMEA Buffer.
- Second core is responsible for:
- On a 10 second interval, get the NMEA Buffer and push it to the MongoDB HTTPS endpoint.
- If WiFi or MongoDB is unreachable for whatever reason (poor WiFi coverage), then retry the NMEA Buffer at an interval and then bulk upload it once WiFi/MongoDB becomes available.
More details on the software can be found in the github repo Mower RTK-GPS Rover.
MognoDB Atlas Cloud Services
MongoDB Atlas cloud services has been used heavily in this project. All that has been used here is provides for free in the cloud service. I have not used any paid MongoDB Services.
The Web frontend - described later - interacts with the MongoDB thru their Web SDK
HTTPS Endpoint
In MongoDB Atlas, an HTTPS Endpoint has been created. This HTTPS endpoint initiates a Function when something is sent to its URL.
Function
The MongoDB Atlas function that has been coded (and triggered by the HTTPS Endpoint) is responsible for:
- Loop thru the incoming array of NMEA Strings and:
- Parse the NMEA string to:
- Timestamp that can be handled by MongoDB.
- Longitude/Latitude as a geoJSON Point format.
- Write to database with insertMany()
- Parse the NMEA string to:
The Function code:
// This function is the endpoint's request handler.
exports = function ({ query, headers, body }, response) {
// This is a binary object that can be accessed as a string using .text()
const jsonBody = JSON.parse(body.text());
console.log("Data Array Length: ", jsonBody.length);
// Array containing all documents that should be written to DB later
let docs = [];
// Verify that data exists
if (jsonBody.length > 1) {
// Loop thru all items in jsonBody array
for (var row in jsonBody) {
// Parse NMEA string
const nmeaParsedBody = parseNMEA(jsonBody[row]);
// Build obj
const obj = {
"device_id": "esp32RtkGPS",
"gps_ts": nmeaParsedBody.gps_ts,
"fix_type": parseInt(nmeaParsedBody.fix_type),
"num_satellites": parseInt(nmeaParsedBody.num_satellites),
"deviation_lat": parseFloat(nmeaParsedBody.deviation_lat),
"deviation_lon": parseFloat(nmeaParsedBody.deviation_lon),
"deviation_alt": parseFloat(nmeaParsedBody.deviation_alt),
"location": {
"coordinates": [nmeaParsedBody.longitude, nmeaParsedBody.latitude],
"type": "Point"
}
}
// Push object to docs array
docs.push(obj)
}
// Write docs to database collection
context.services.get("mongodb-atlas").db("geospatial").collection("telemetry").insertMany(docs)
.then(result => {
response.setStatusCode(200);
})
.catch(err => {
console.error(`Failed to insert telemetry item: ${err}`)
response.setStatusCode(400);
});
}
return;
};
// Function that parses NMEA GxGGA string
function parseNMEA(nmeaString) {
// Transform NMEA string to Array
const nmeaArray = nmeaString.split(",");
const local_ts = new Date();
// NMEA string only contains HH:MM:SS so we need to add YYYY:mm:DD it
const gps_ts = new Date(local_ts.getFullYear(), local_ts.getMonth(), local_ts.getDate(), nmeaArray[1].substr(0, 2), nmeaArray[1].substr(2, 2), nmeaArray[1].substr(4, 2));
const lat = nmeaToWGS84(nmeaArray[2], nmeaArray[3]);
const long = nmeaToWGS84(nmeaArray[4], nmeaArray[5]);
const obj = {
gps_ts: gps_ts,
latitude: lat,
longitude: long,
fix_type: nmeaArray[6],
num_satellites: nmeaArray[7],
deviation_lat: nmeaArray[21],
deviation_lon: nmeaArray[22],
deviation_alt: nmeaArray[23]
};
return obj;
}
// Convert NMEA (d)ddmm.mmmm format to WGS84
function nmeaToWGS84(deg, latorlon) {
// Get the whole degree part
const degWhole = parseFloat(parseInt((deg) / 100));
// Get the fractional part
const degDec = (deg - degWhole * 100) / 60;
// Complete
let degr = degWhole + degDec; //Gives complete correct decimal form of Longitude degrees
// Check if value should be negative
if (latorlon == 'W' || latorlon == 'S') { //If you are in Western Hemisphere, longitude degrees should be negative
degr = (-1) * degr;
}
return degr;
}
Database
The database consists of two collections and one view:
- A time-series collection which stores all the GPS/GNSS data points sent by the mower. All documents stored in this collection has a unique timestamp and all contains the long/lat in a geoJSON Point format. - The reason why I use geoJSON format is to utilize the built-in capabilities in MongoDB to perform geospatial queries.
- A collection that holds all assets, such as the mower as well as the lawn geoJSON features.
- A view that groups the time-series collection data on a per-day view.
Web Frontend
As stated earlier, the MongoDB Web SDK is used to handle the authentication to the MongoDB database and for all the reads/writes from/to the database.
MongoDB has support for geospatial query’s, meaning that we can perform queries based on Latitude/Longitude information. This functionality is used in a geoWithin combined with a not to exclude all data points for when the mower is parked in the charger.
At first, if the user isn’t logged in then a login page is shown:
After login, the user is prompted with the default page:
Settings
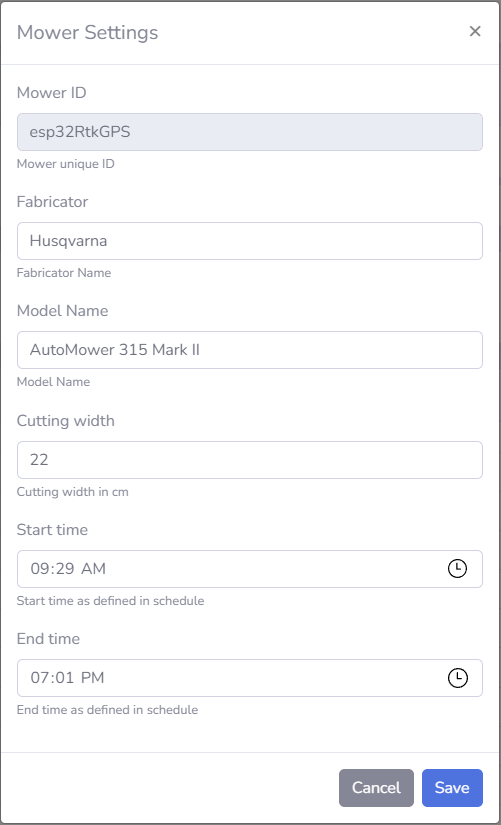
Mower settings can be managed:
- Fabricator and Model Name are both descriptor fields.
- Cutting Width is in centimeters and controls how wide the path will be drawn later. In this solution each pixel on the canvas is a 1x1 square centimeter.
- Start time and End time is used as from/to time when querying the database.
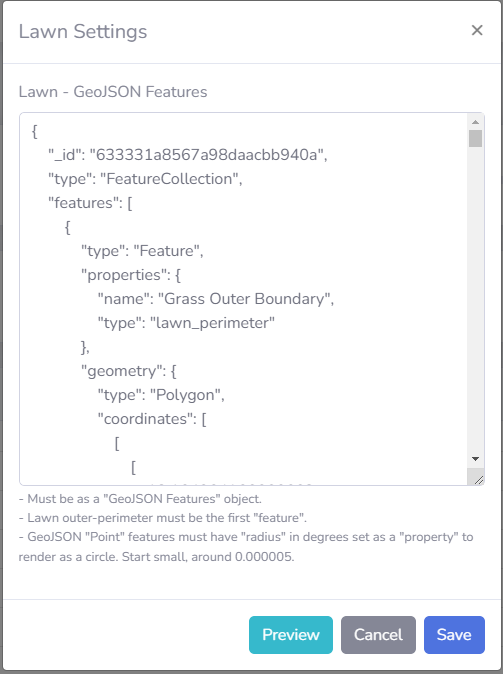
Lawn settings can be managed:
- Takes an geoJSON features object as input. A geoJSON features object can contain multiple feature objects and the perimeter of the lawn must be the first feature object in the array. Additional features can be added to exclude areas for trees and stairs etc from the Lawn area. If “name: charging_station” is set on a geoJSON feature then this “point” will also be used as an not geoWithin input in the DB Query.
Per day Statistics
Once the desired days has been selected in the table, then it will loop thru each selected day and render it on a canvas (which by default is hidden) where the resolution is set so that each pixel represents 1x1 square centimeter.
After the “path/track” has been drawn (red pixels) based on the Latitude/Longitude data points, then the number of green pixels on the canvas are counted and compared to the number of green pixels that existed before the path/track was drawn. - In this way we can determine how many square centimeters that are mowed (the pixels that now are red, and no longer green). The square cm represented by each pixel are then translated to square meters.
When the hidden canvas has been fully drawn for one date, then a snapshot is taken from it and displayed in the Per Day Statistics section, and then it clears the canvas and continues with the next date:

Cut Percentage Chart
This line chart displays how many square meters that has been cut in total, and how many “unique” square meters that has been cut. - As expected, this graph rises quickly in the beginning and then it flattens more and more as it gets closer to 100%:
Conclusion
I do not consider this randomized cutting pattern to be inefficient since the grass on my lawn looks much better with a robotic lawn mower compared to how it looked before the robot mower.
I performed these tests just to verify how much time the robotic lawn mower really needed to spend on cutting before it comes close to 100% coverage. - I do not plan to make any changes related to my mower since im very satisfied with it.
As far as I can tell, the biggest issue with my data collection is that the GPS antenna isn’t placed directly over the center of the cutting disc. This results in some errors, primarily when the performs its sharp turns. - The reason why the GPS antenna wasn’t centered directly over the cutting disc was due to its weight.
I used GPS hardware that I already owned from previous projects and the antenna along with the 10 000 mAh battery adds a lot of weight and that had some impact on the lawn mower when the weight was placed to far in the front, so I had to move it backwards around 10 cm to maintain traction.